Overview
This page covers any general information for the Fly-Super8 board.
It is currently available through AliExpress.
Board Fuses
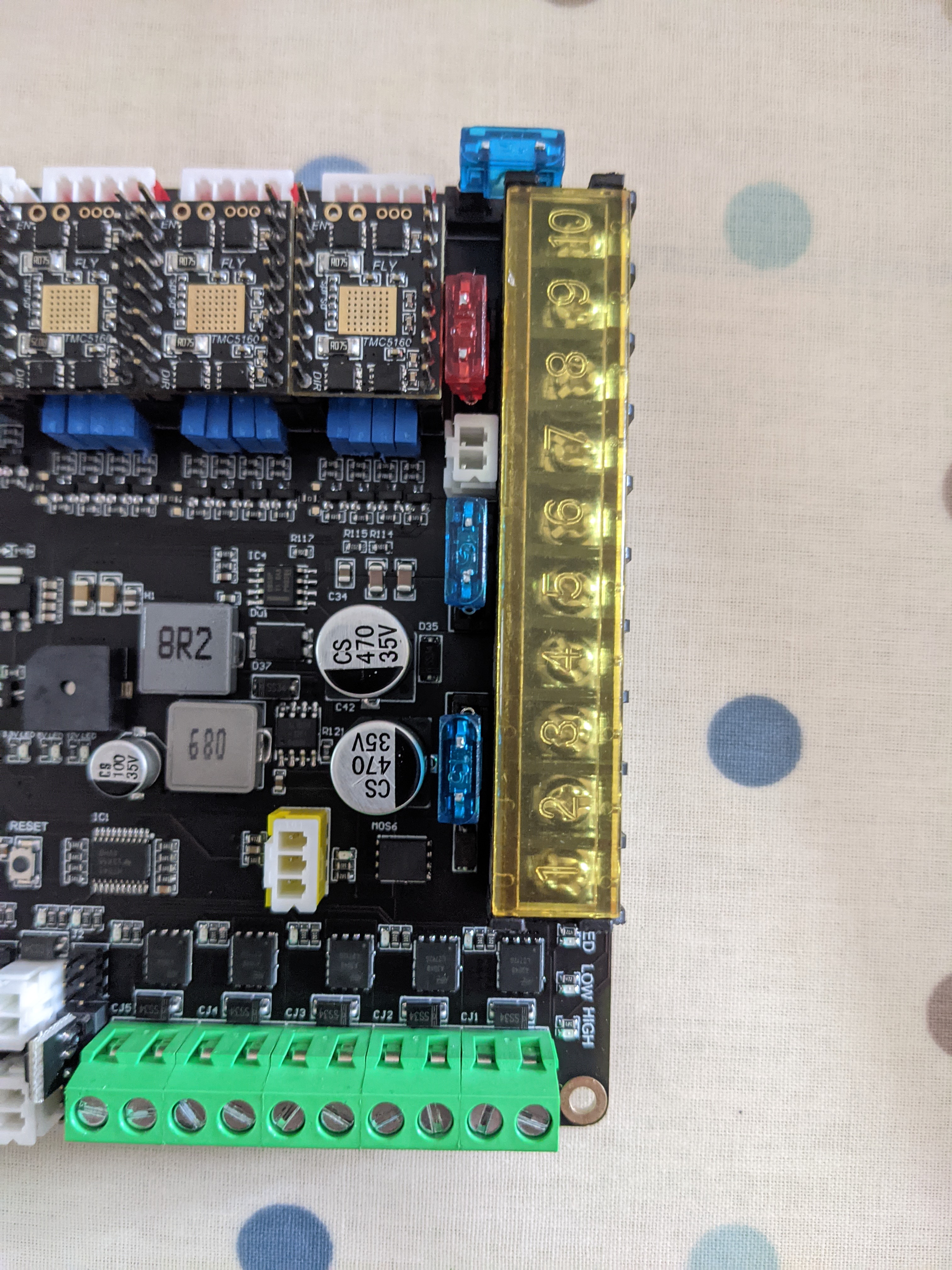
The board is supplied without the fuses installed.
It is supplied with different fuses than the listing on AliExpress. The fuses should be installed as shown below.
Board Power
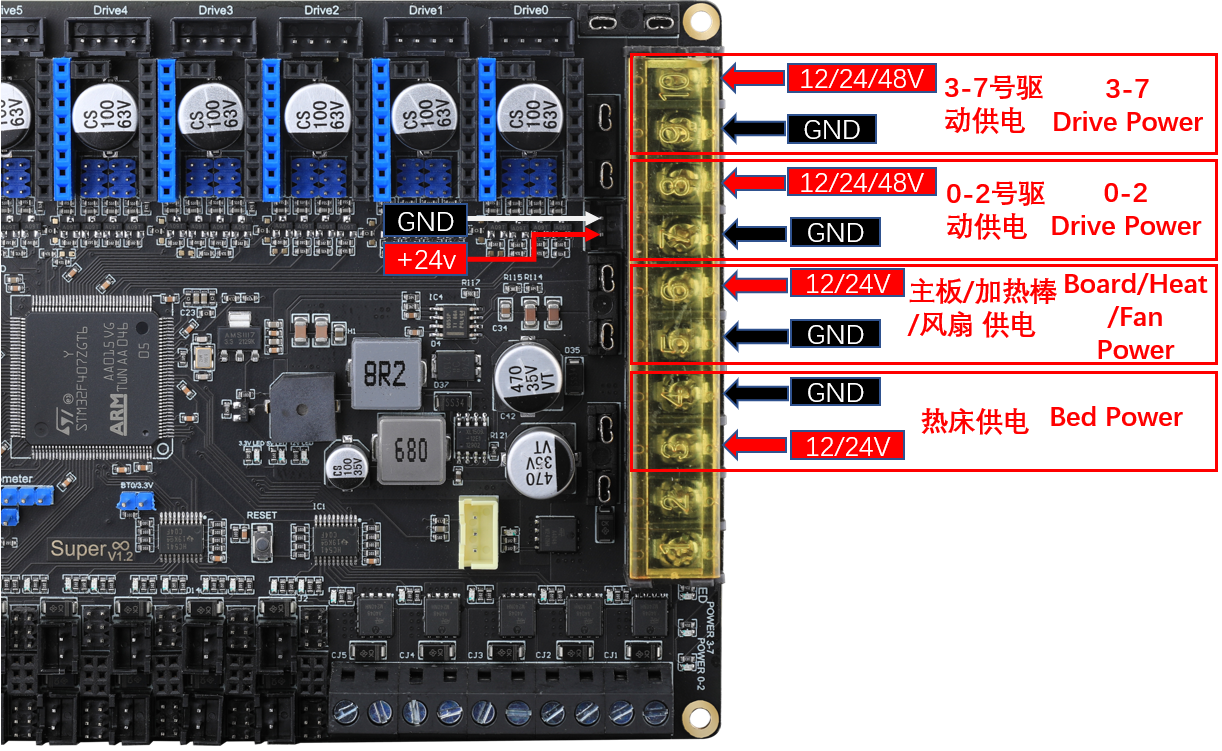
The Fly-Super8 has 4 lots of power inputs. The first one powers drivers 0 to 2, the second one powers drivers 3 to 7, the third one powers the boards, heaters and fans and the last one powers the bed.
Driver Jumpers
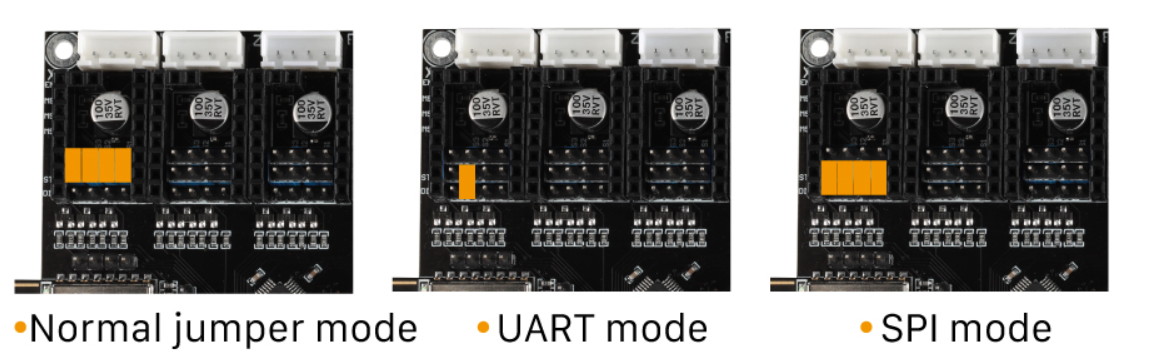
The jumpers should be installed as below. “Common Interpolation” should be used for standalone drivers. “SPI mode Interpolation” is supported for TMC5160 drivers. “UART mode Interpolation” should be used when using smart drivers (i.e. TMC2208, TMC2209, TMC2225 and TMC2226)
Driver Diag Pin
The driver diag pin is used for sensorless homing and stall detection.
The Fly-Super8 does not have a way of disabling the diag pin as it is designed to be used with Fly-2209 drivers which have a switch on the underside of them for disabling the diag pin.
If you plan on using endstops rather than sensorless homing and do not have the Fly-2209 drivers, you need to bend or remove the diag pin.
Driver Signal Voltage
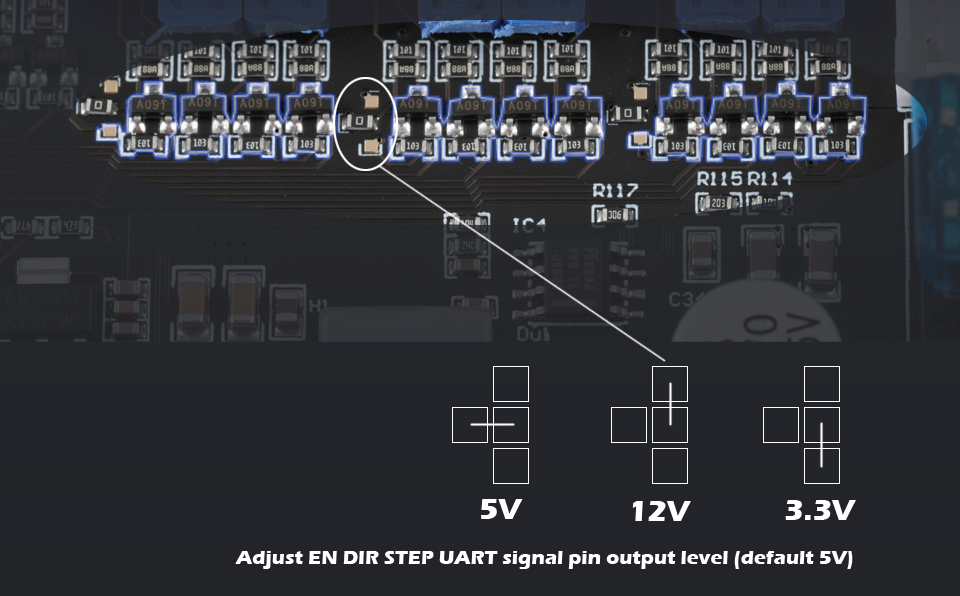
The output voltage of each driver EN, STEP and DIR can be configured to either 3.3v, 5v or 12v. The default is 5v.
Fan Mosfets
The Fly-Super8 has a unique feature in that the fan mosfets are replaceable. Each mosfet (VS3622e) controls two of the fan outputs. The orientation that the fan mostfet is plugged into the board doesn’t matter.

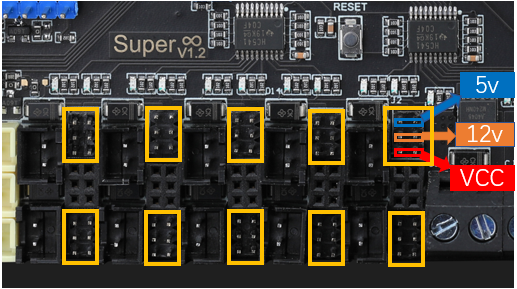
Fan Voltage
The fan voltage can be set using jumpers to either 5v, 12v and Vin.
Set them as shown below.
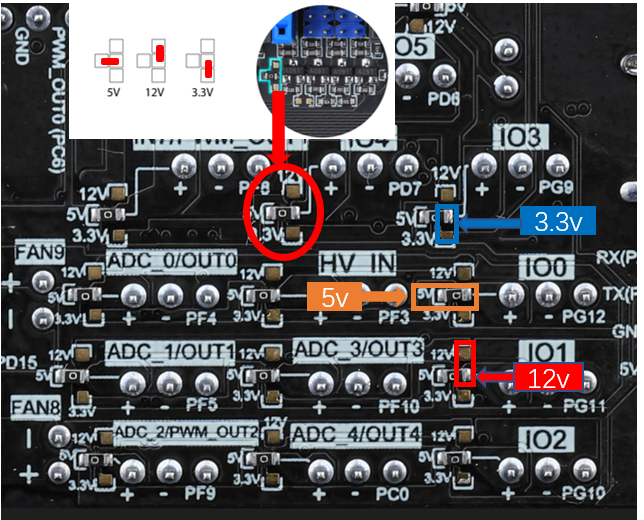
IO Output Voltage
The IO output voltage can be set to either 3.3v, 5v or 12v. The default is 5v.
Set them as shown below.
Maximum HV Input voltage
The three HV drivers have been tested with 48v.
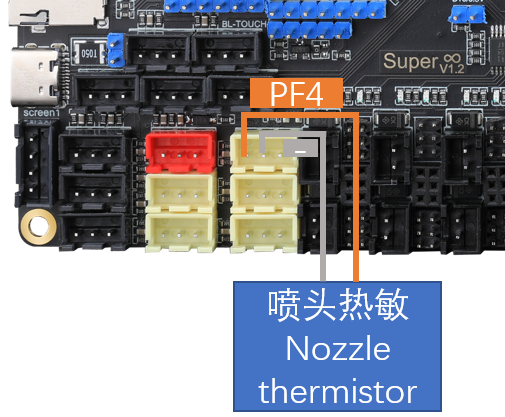
Thermistor Connection
Thermistors should use the ADC inputs. The thermistors should be connected between ground and the signal pin.

Initial Installation
The board that you will receive doesn’t have any firmware installed so when plugged into a computer, the board will show as an unidentified device. Follow the WiFi instructions.